Dear all,
We have a project which is basically a rotary printer. To rotate it, we use a ACOPOS drive from B&R.
Now, we have an external 5V TTL encoder that is located on our printing press, which measures the speed of the paper. We as the rotary printer will have to follow and match this paper speed so we can print correctly.
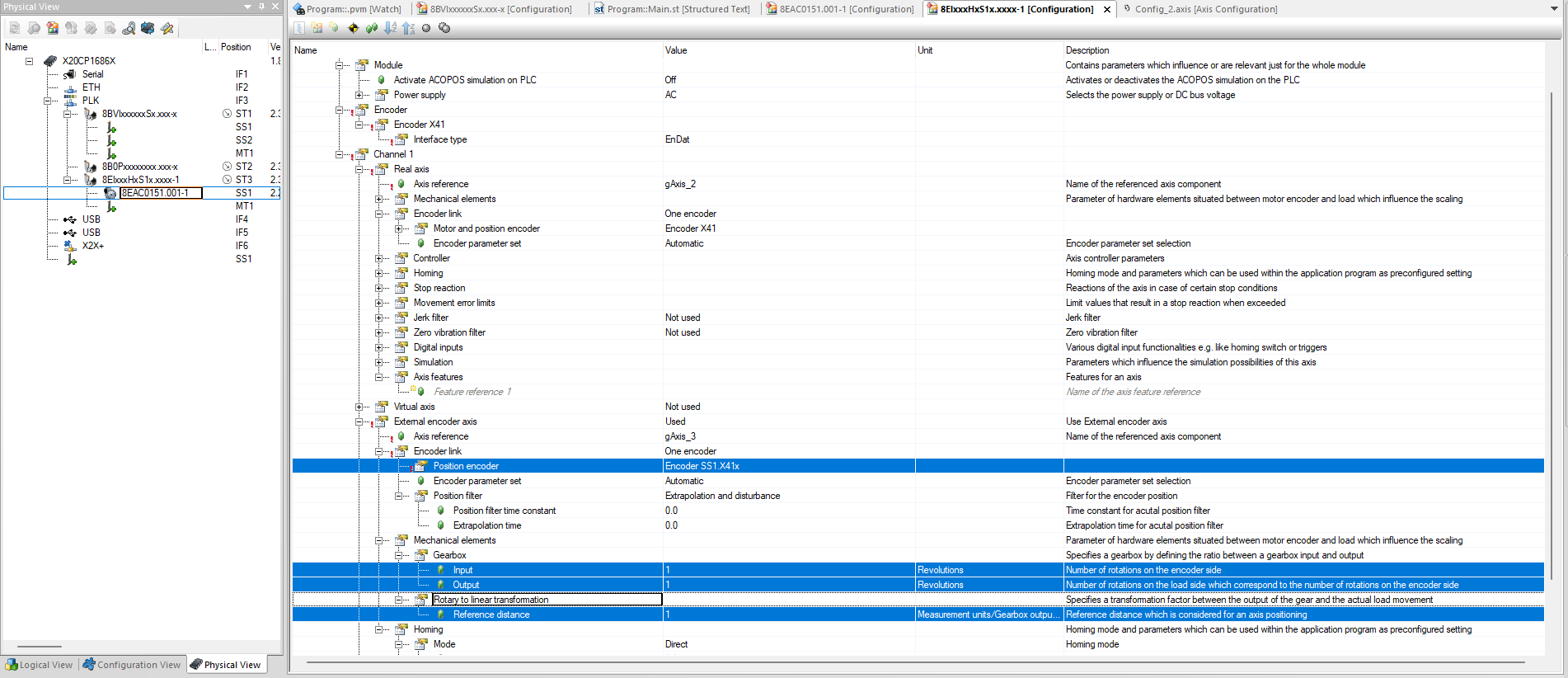
My question is, we will connect this external encoder to a plug-in card on our ACOPOS (8EAC0151.001-1)
In my Automation Studio project I have made an extra Axis configuration which I will then reference under “External encoder Axis” inside my drive configuration.
Is there then a BR function block which can read the output from this encoder? (F.e MC_ReadActualVelocity)
We need only the velocity.
Or what is the best way to do this. Do I need to make a complicated formula knowing the encoder’s pulses per revolutions and other type of details?
Please let me know in detail, I have never worked with encoders.
Hello,
Yes the functionblock “MC_ReadActualVelocity” can be used for this Setup. Here is a link to the Documentation in AS-Help.
Supported Library Functions for External-Encoder Axis-Objects
If the Transmittion Ratio is fix for the Encoder i think you can set up all nessesary Data in the Configuration Settings. “Lines per Rev”, “Gear”, … it only gets more complicated if the Transmittion between the Paper and the Encoder would change.
The whole setup should work as known from an normal Axis-Objekt.
Greetings
Michael Bertsch
Michael,
Absolutely perfect - Just the information i needed, thank you so much.
@michael.bertsch One more thing regarding this subject, in case you still see this.
If I were to use MpAxisBasic instead of MC_ReadActualVelocity, would I only have to fill in the MpLink to my axis config and then I would already get the velocity? Or do I need to keep something in mind? Since I cannot control the external encoder in terms of MoveVelocity or anything, maybe only a home signal.
Thanks!
Hello,
yes you can continue a solved thread, the anouncments still show activity. 
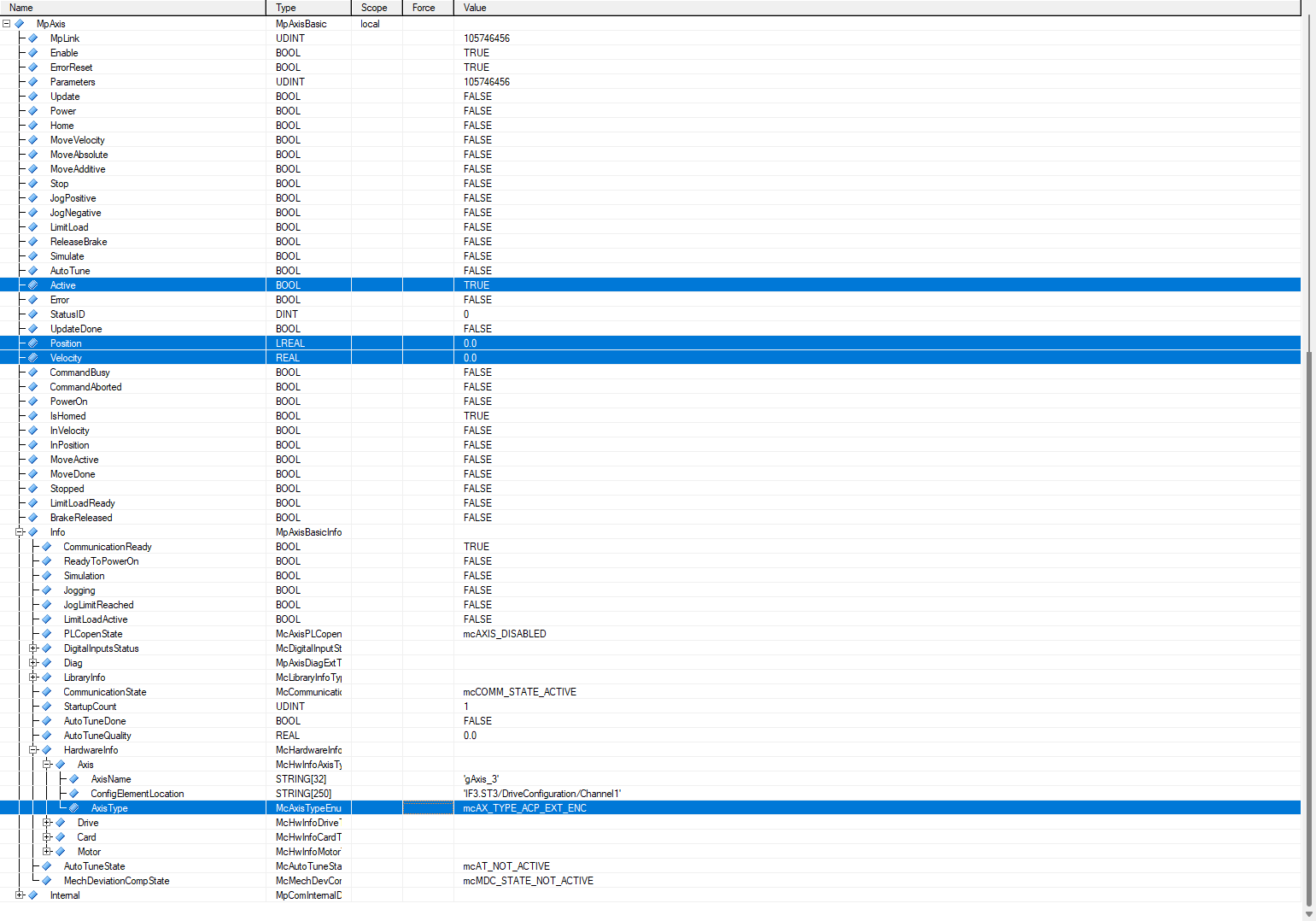
Yes you can use the MpAxisBasic also for an ExternalEncoderAxis.
You will see the Type of the Axis in the Info-Section.
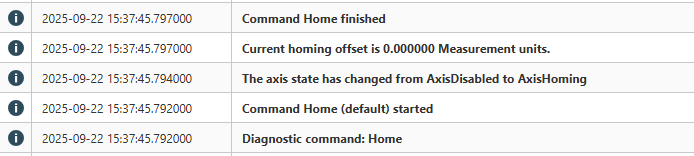
The Home Command can be used via the Functionblock MpAxisBasic.
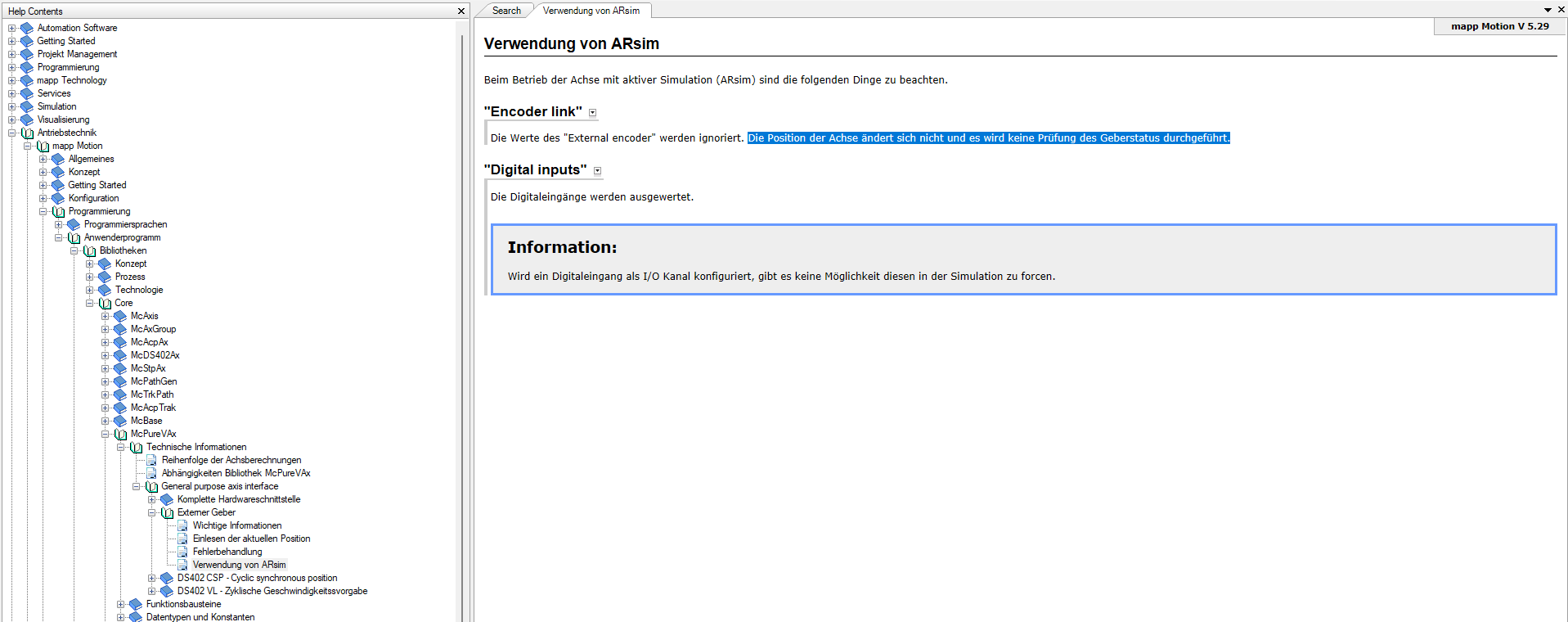
There is a limitation of ARsim for External Encoder-Objects. The Position will not be evaluated. So if you will test the homing in ARsim you will not see a Position change, which can be distracting. But currently this is an intended behaviour.
If you set the power for example by mistake… you will get an error, which can be reset. So you get a clear notification what was the mistake/error.
Greetings
Michael