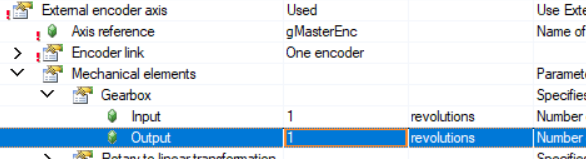
I need a way to dynamically write my acopos drive configuration, so from HMI I want an engineer to write the Input/Output rotations of the external encoder in a variable and then write it to the configuration. It seems a restart is needed to accomplish that and that is fine for me.
Now I understand I can use MpAxisBasicConfig or use MC_BR_ProcessConfig for this.
I have tried MpAxisBasicConfig but in the datatype MpAxisBasicConfigType I cannot find the mechanical elements for the external encoder, only for my own axis.
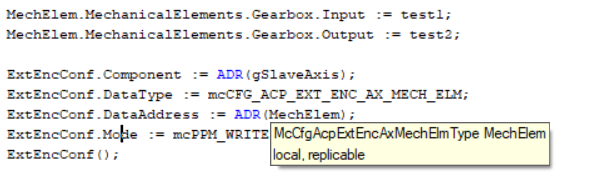
MC_BR_ProcessConfig is just as confusing as I lack the knowledge on this block.
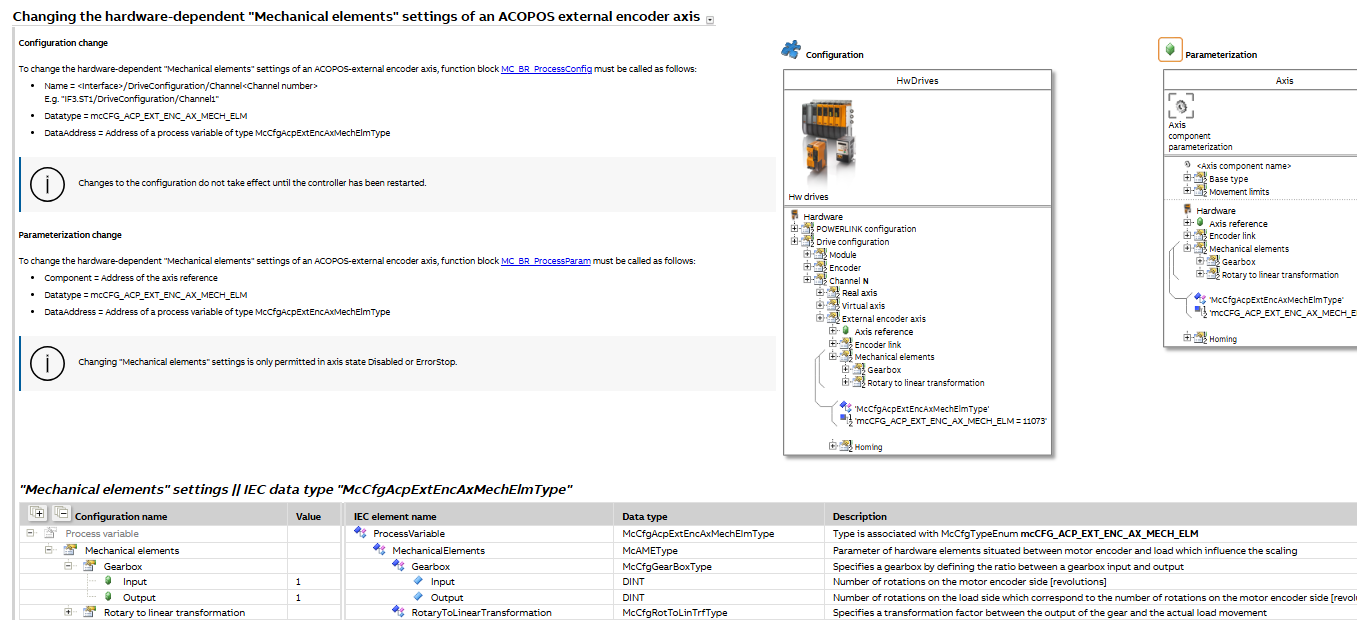
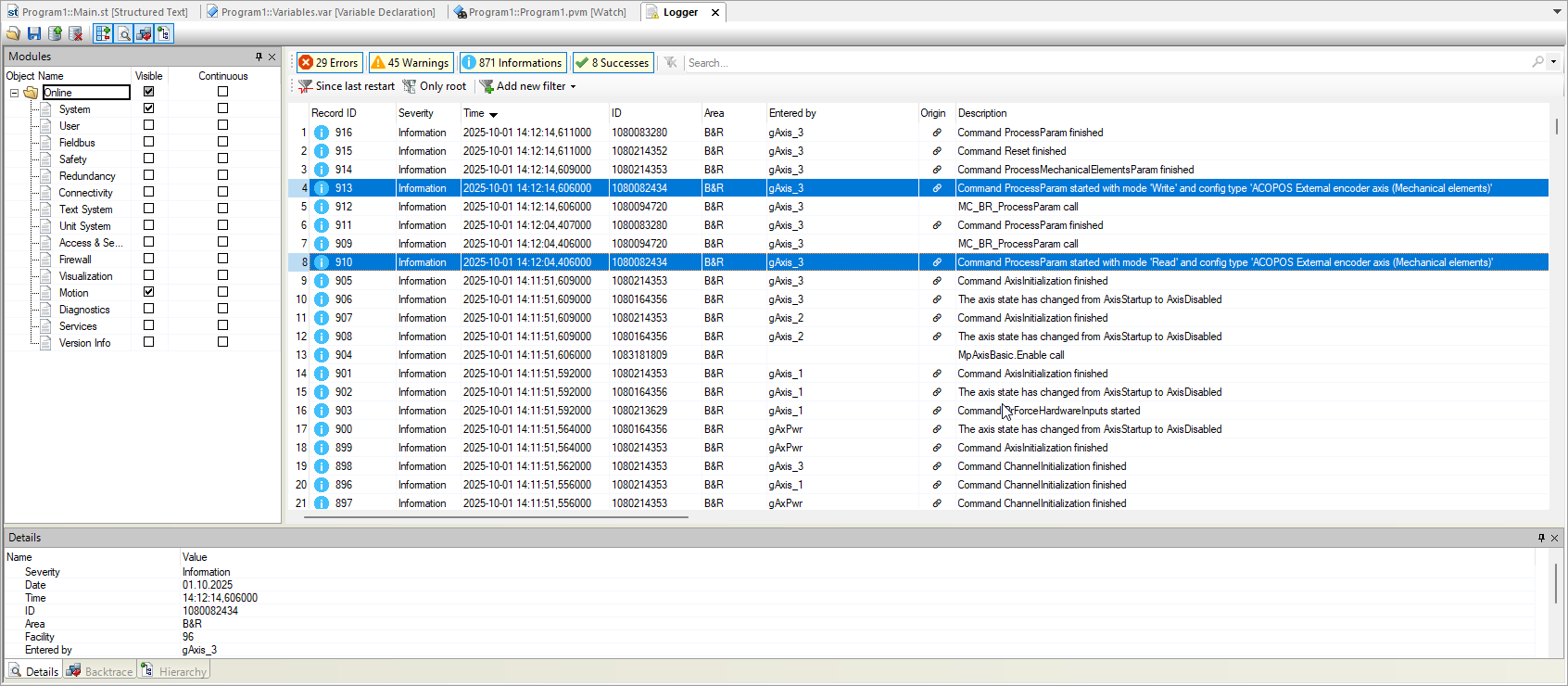
There is a headline Changing the hardware-dependent "Mechanical elements" settings of an ACOPOS external encoder axis which seems to be exactly what you need:
That does seem to be what I am looking for, but wouldn’t I need to use MC_BR_ProcessConfig (because it retains the configuration even after a restart, whereas ProcessParam only keeps the value until restart?)
But for some reason this does not have a WRITE command, only load, save or create.
It depends on your software architecture which Functionblock will better suite.
MC_BR_ProcessConfig does save the values on the CF and is retain, but needs a restart for activating the changes.
MC_BR_ProcessParam does make the changes in the active Data whithout an Restart, but is volitile.
If you have some own Configuration File it could be nice to use MC_BR_Param after you loaded your own File. It is also nice to skip the Restart.
You could even think of use both, make it retain in configruation via ProcessConfig and the use ProcessParam with mcPPM_LOAD_FROM_CONFIG to activate the changes immediatly without restart.
You have the choise.
Here we had a nice Picture about the two Functionblocks and some notes.
One Functionblock uses Write the other Save | Read vs. Load. Picture for Overview
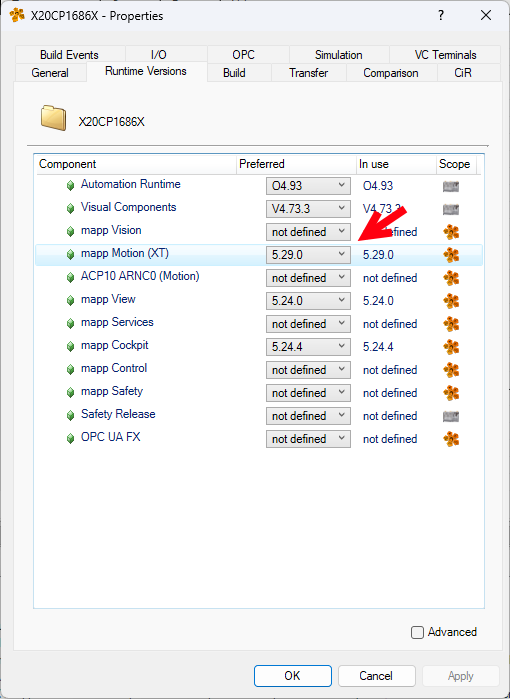
Can you please have a look at the used MappMotion Version. The Documentations states that a minimal Version 5.16 is reqired for this function. I have tested in the newest Version 5.29.
I am using AS6.3.3.14, MappMotion version is 6.4.1. When I click “Advanced” the component McAcpPar (which looked like it had something to do with parametrization writing) was disabled, I put it on 6.4.1 but this does not make the difference so far.
I have also tested with the Real Axis gear ratio and there the function block finishes correctly. Is there a function block to monitor if the values have succesfully transferred?
I will try MappCockpit in a bit, that would be great if it shows the right values there.
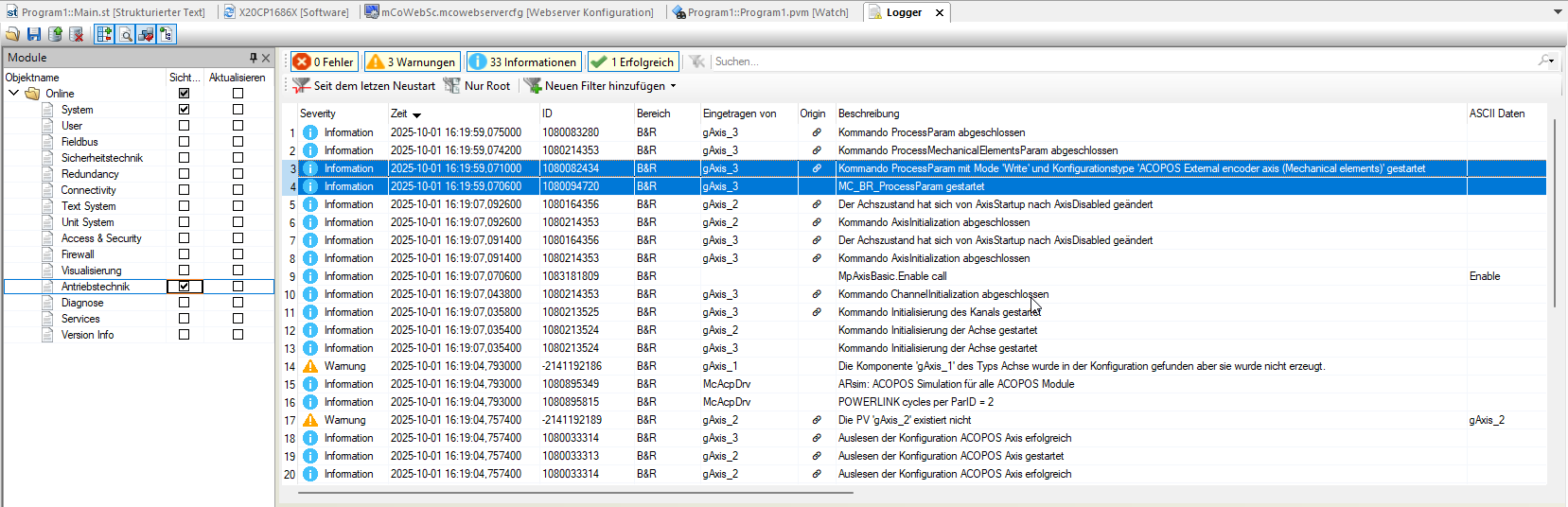
Unfortunately no luck on the ProcessParam + external encoder gear ratio. However, ProcessConfig on the other hand seems to work (no error and Done gets high).
I am currently only on simulation, but will be testing on hardware in a few days.
Strange that it cannot find 6.4.1 for you. I on the other hand can’t seem to find 6.5, the latest upgrade is 6.3.2, also weird because my version is higher, but it still wants to download a lower version
MappMotion 6.3.2 was the newest version in Upgrades and Website.
The 6.5 i used was prety sure a preRelease only available for B&R at the moment. I just thought to use a newer would include the Status of the older. I loaded it from internal B&R Source. Sorry if this lead to a confusion.
I thought 6.4 was released on ~1.9.2025 but not sure what happend to it.
If you used ARsim, i don’t know were’s the differnce.
Good to read that the ProcessConfig had worked.
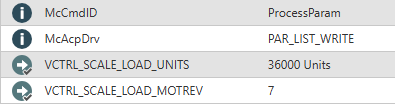
In the DriveLog on MappCockpit I could only find SCALE_ENCOD2_REV which showed me the output gear of my external encoder.
I also want to change my own axis’s gear ratio with MC_BR_ProcessParam, I have executed the block and it gives a done signal, is there some way to also read the input/output gear somewhere, to make sure the block was succesful, not only relying on the done signal.
the gear ratio of the axis ends up on these ParIDs:
VCTRL_SCALE_LOAD_MOTREV = Mechanical elements/Gearbox/Input
VCTRL_SCALE_LOAD_UNITS = Mechanical elements/Gearbox/Output x Mechanical elements/Rotary to linear transformation/Reference distance x 1/Measurement resolution
I’m not strong in motion staff, I can see there are some possibilities, but for me it is not clear if these are really the solution or not. If not, can you please get in contact with first level support, provide a link to this thread, maybe they can test it for you? And update us with final conclusion? @corne.geerts can you help us with this topic?
Hi @Patrick_Pennarts, please get in touch with local support, share with them a link to this discussion and please update update us with final findings.