I have an axis group set up with two path definitions, ‘ScaraPath’, and ‘SecondPath’. SecondPath has restrictive velocity and jerk limits.
When I run any motion program, the path speed/accel/decel/jerk is limited to the most limiting of the two paths, even when I explicitly use SetFeedPath to the faster path.
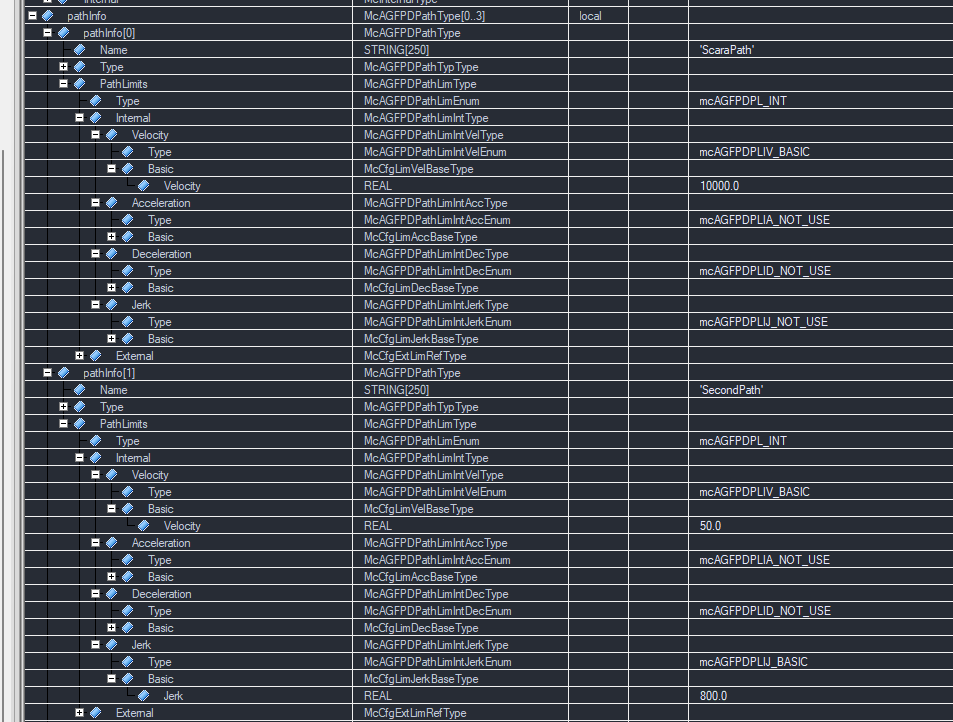
Monitoring elements McPathGenMonElemFeedSettingsType shows the correct path name and McPathGenMonElemPathInfoType show the correct path limits, but the path velocity is still limited to the slowest path.
Would love any insight into if this is a b&r bug, or I am implementing this poorly. Screenshots below showing my path setup.
AS version 4.12.5.95
The Path Definitions are all active. All Path Definitions can be understood as AND linked.
SetFeedPath is not intended to switch between Path Definitions. It only switches to which Definition the Feedrate is linked
If you know the behaviour from ARNC0 OptMot, this is different in MappMotion.
If you want to switch Limits on your Path Definition, i would suggest to have a look at G107, preparing two Limit-Sets and switching the Limits in the Path Definition in this way.
If this is not helpfull, please descripe your UseCase, so we can discuss possible solutions.
We cant see the Type of your limits in the pictures.
SetFeedPath - was designed for example for situations where you have a Gripper Motor on an Delta. You have one XYZ Path for the Robot and a second unrestricted Path for the Single Axis. So you can switch the Feedrate in the Program to influence the Speed of the Single axis, if no XYZ Movement is active.
The use case is that I am testing reduced jerk limits for a particular movement. I want to be able to test a configurable jerk limit without needing to power cycle the the PLC.
The reason I wasn’t originally using limit sets is that from my understanding limit sets can only be modified through processConfig which need a plc restart. There is the possibility of creating many limit sets and switching between them, although that is pretty messy and not as configurable as I would like. Please let me know if you can think of any way to adjust a configurable jerk limit during runtime.
i have heard this requirement already, but we do not have a good solution for it. As far as i know (up to mappMotion 6.6).
You pointed already the issues…
Path Definition is changeable during Runtime via ProcessParam but only while Group is not moving. And it is active for whole Program and not only for sections.
LimitsSets are only changeable via ProcessConfig, and are only active after Warmrestart. ProcessParam does not support “Load From Config” or “Read/Write”.
G107 can be used to switch between Limit Sets, but it is a hurdle to set up various amounts of Jerk-Variants.
There is no G-Code to directly influence Path Jerk as it is for Acceleration like ACC.
But currently last variant with G107 is the only one which you can use up now. Especialy if you want to have the limit only active in some sections of the Programm and not all time.
If this is not only a short term commissioning topic for you, please get in contact with local sales and discuss it as a possible use case which could be improved.
Hi @mykalrudie ,
I know you have to be brave to add a note in particular on the axes group topic after Michael…in one application in US we reduce the acceleration and deceleration in one particular axis in a section of path inside the g-code and it doesn’t require warm restart ACC/AXIS_ACC_DEC/AXIS_ACC/AXIS_DEC, maybe at the first step reducing ACC/DEC should be enough.