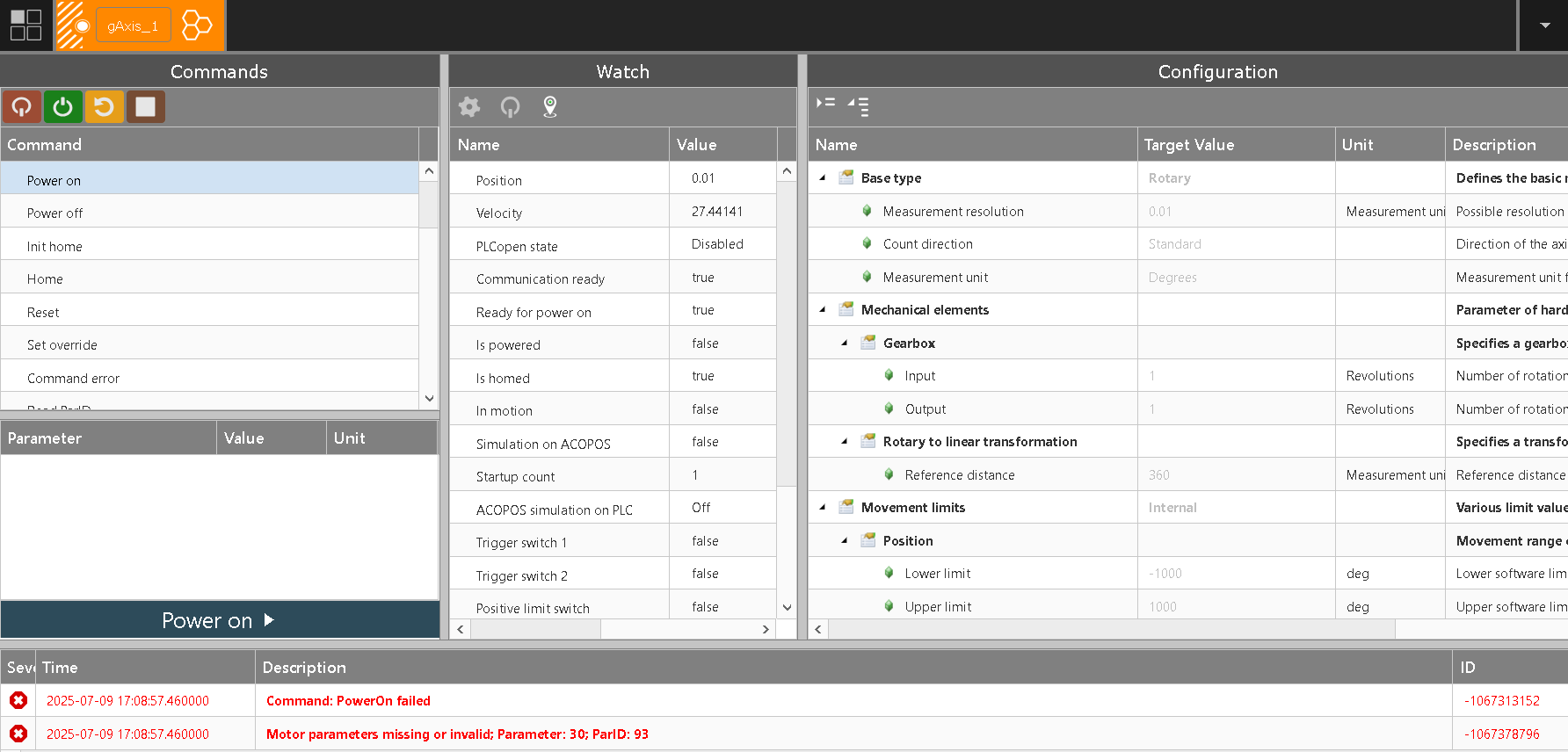
I can not power on the motor on cockpit, I think the configuration is OK.
Please help me check that , thanks!


Desktop.zip (46.8 KB)

Hello Jan,
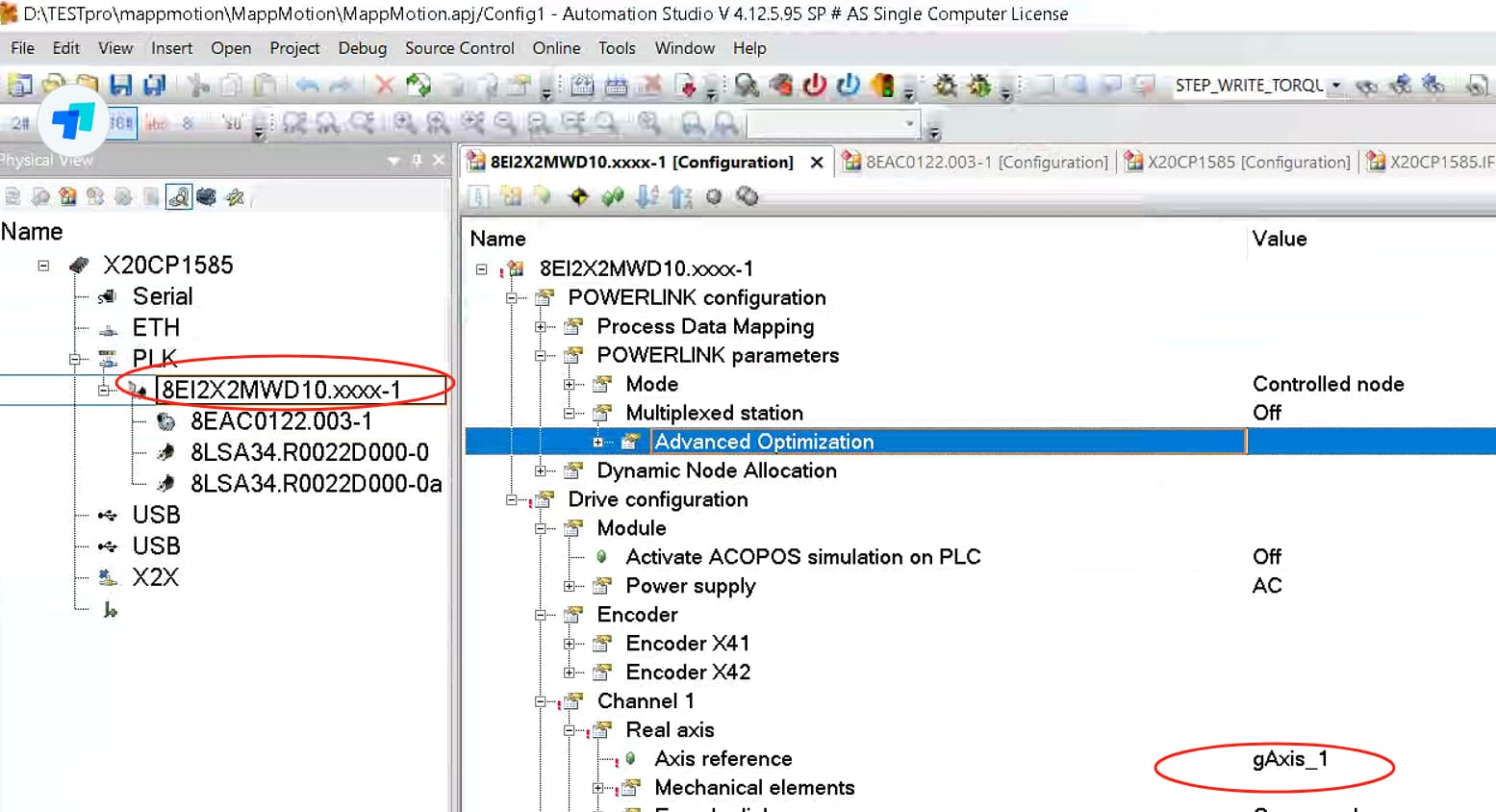
This is the nct/drive log and Encoder config, it seems the motor parameter does not configured.
But the motor parameter should load automatically I think.
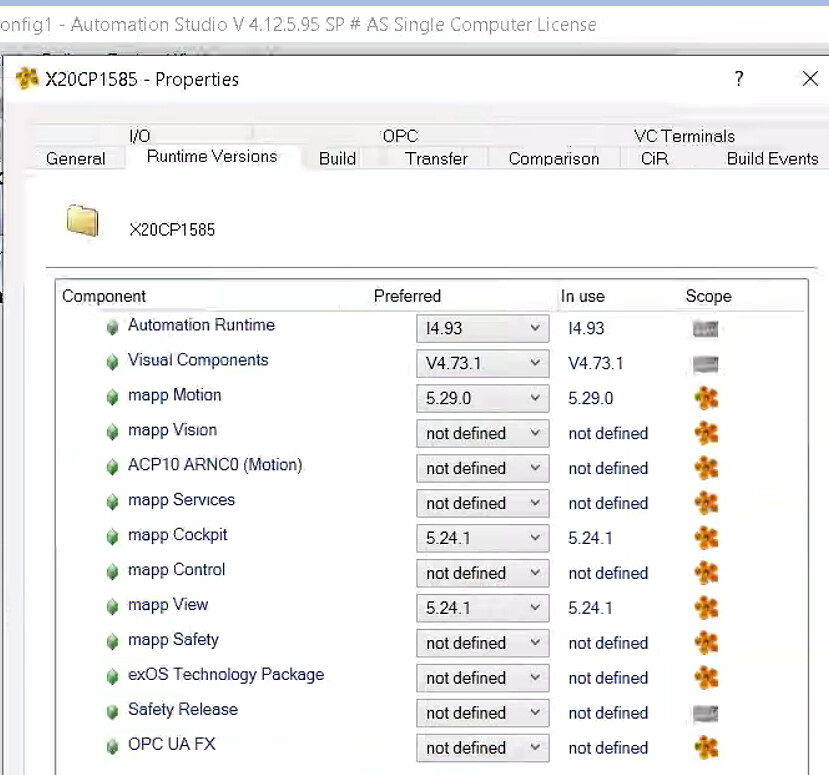
I see these are old motors without a 2.0.0 upgrade
Can you try and copy the content of the motor files to the motorsynchronous_any hw file? Maybe this will help.
In addition to the comment of Jan. Please note that in MappMotion the motor configuration some of the parameter have a changed precision/exponent.
Can you try and copy the content of the motor files to the motorsynchronous_any hw file
Hello Jan,
We tried this:
- Manually write the motor parameters into the parameter table A34R0_2200.apt.
- Add Config_3.axisfeature (Feature_AcpParTable) in mappmotion.
- Call A34R0_2200.apt in Feature_AcpParTable.
- Call Feature_AcpParTable in the channel characteristics of the servo.
We use these steps and now it works well.
Thanks!