I am doing homing with MpAxisBasic, for this I selected the mcHOMING_LIMIT_SWITCH mod section. When I set homing to true, it searches for the sensor. I want the sensor to be positioned as 0 on the rising edge. How do I add the sensor to the program?
Hi,
there are some more options available in this mode.
Please select them [from here] (B&R Online Help)
maybe this mode. It will then be the falling edge with the advantage that limit switch is free after homing.

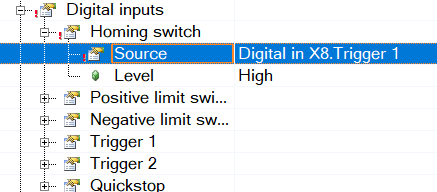
and you must enter the parameters then here:

the value you entered in .Position will then be the axis position reached at the edge (not the stop position after homing !)
Dear Administrator, I move the servo motor until I see the sensor. How can I add the sensor to the software? I want it to stop when it sees the sensor.


Dear Sir, my inputs go into PLC. When defining these inputs, we need to select the verifiable option from the source option in this region and assign PV mapping, right?
Hi Ferhat,
yes. that should be the simplest way. But be aware you must take the delays of PLC and network into account so your homing precision will decrease.
To get rid of this you should activate the ‘ReferencePulse’. But this can also be tricky in some cases.
btw: which encoder do you use ?
Dear admin, I am coding in st language
Hi Ferhat,
no I mean the encoder = the device that determines your position and speed. ![]()
normally you use that was is built into the motor …
the reason I asked is: if you have a multiturn encode then there would be other options to home.
Yes, dear administrator, I do not use a separate encoder. Thank you for your valuable information, dear administrator ![]()
Hello Salvador,
sure, homing switch is also possible. It depends what your requirements are.
If you take one of the limit switches then you can use them as limit switches, too.
The homing switch instead becomes ‘umemployed’ after the homing sequence ![]()
Hello Christoph, I understood your point and you are right, it is a bit more convenient to use it as a limit switch. Thank you