I have two sets of 80MPD1.300S014-01, X20SM1426 and 80CM03013.21-01.
I made connection between 80MPD1.300S014-01 and X20SM1426 using 80CM03013.21-01 by referring datasheet of respective hardware.
While configuring X20SM1426 in AS 4.12, there is a section where I need to key in “Standstill Current”, “Constant Speed Current” and “Speed Change Current”.
Where can I get this numbers? I could not find it in the any of these three documentation. Do I need to calculate to get these values?
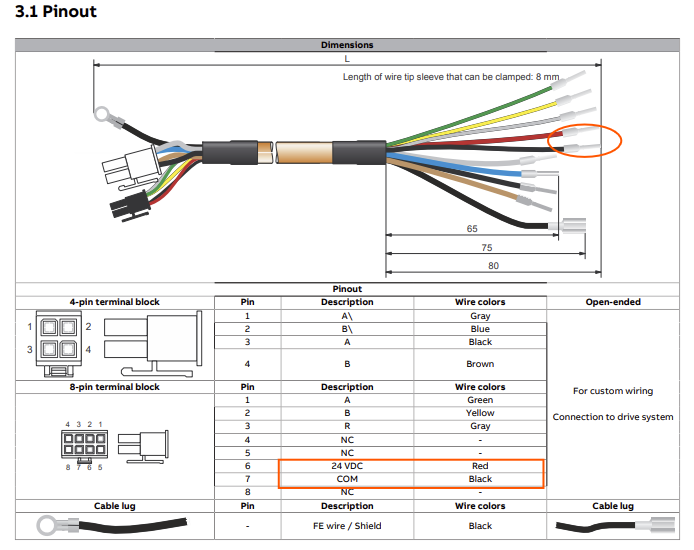
Besides that, where do I connect the Red(24VDC) and Black(COM) wires of open-ended Hybrid cable(80CM03013.21-01)
While configuring X20SM1426 in AS 4.12, there is a section where I need to key in “Standstill Current”, “Constant Speed Current” and “Speed Change Current”.
Where can I get this numbers? I could not find it in the any of these three documentation. Do I need to calculate to get these values?
The Values can be set up by the user.
In the Default setting of MappMotion:
the value of “Standstill” is applied if the Velocity = 0
the value of “Constant Speed” is applied if the Velocity is constant
the value of “Changing Speed” is applied if the Velocity is changing due to acceleration
This system was introduced to give the user the opportunity to lower the heating of the motor. The Values for the Current should not surpass the Nominal Motor Current of the Datasheet. The values can all be the same (typical CNC operation) or lower for standstill and higher for acceleration (typical non vertial simple move A->B).
If you have an activated Position Control you have to consider that also in PLCopen State Standstill the Controler can lead to movement of the Motor, so the Standstill Value must still be able to move the motor in this setting.
The Functionblock “MC_BR_SelectMotorCurrent_StpAx” can be used to manipulate the automatic current selection.
Besides that, where do I connect the Red(24VDC) and Black(COM) wires of open-ended Hybrid cable(80CM03013.21-01)
To supply the encoder with 24V you can use any 24V source.
You can extend the wires and connect them to an different Terminal.
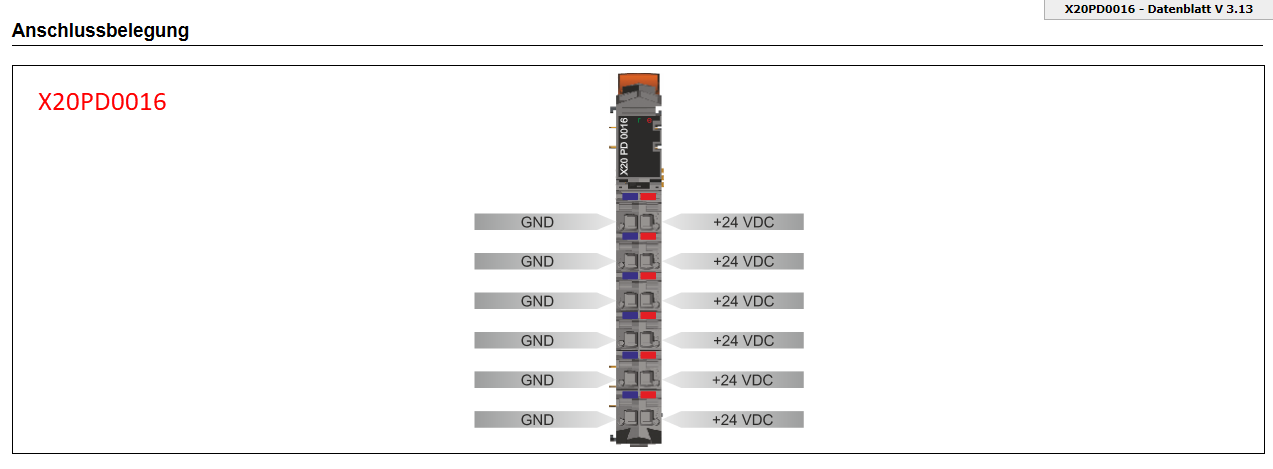
You can use X20PD0016 to have a terminal next by (external supply)
You can use X20PD2113 to have a terminal next by (IO-Voltage supply backplane)
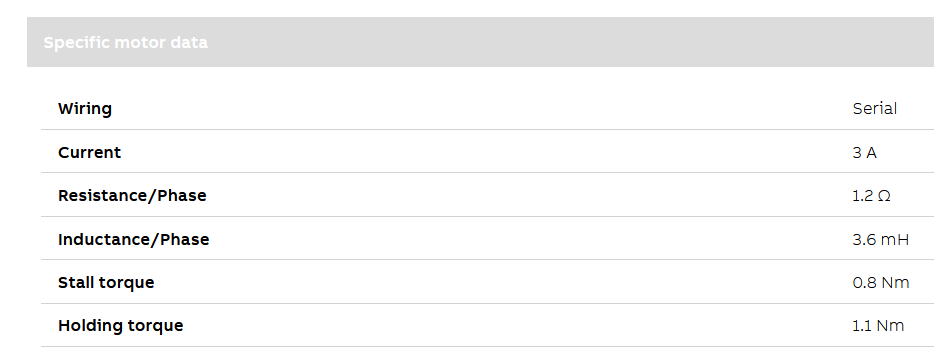
The 80MPD1.300S014-01 has a max. current of 3A.
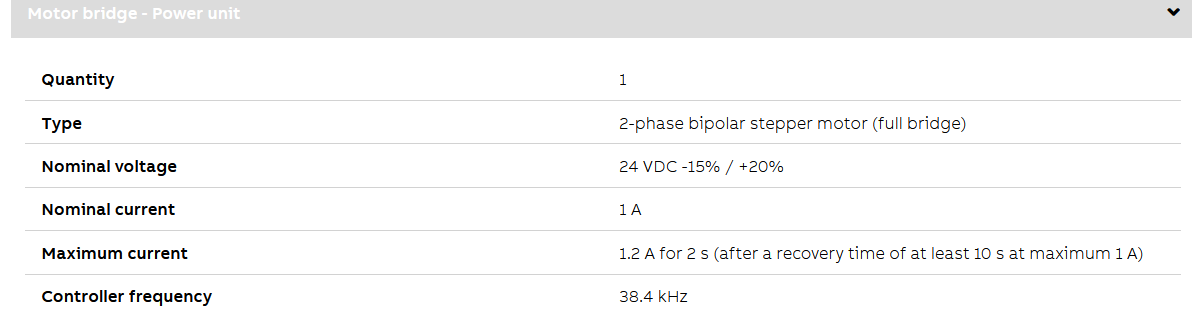
The X20SM1426 allows for a max current of 1.2A at 2s max time, while 1A can be used without any restrictions.
Standstill Current: 0,5A
Constant Speed Current: 1A
Speed Change Current: 1,2A (if still under 2s)
Regarding your wire connections, both need a connection via an external 24V DC supply, as the X20SM1426 module has no supply for the encoder included.
Thank you very much for the advise. I have wired the 24VDC and COM to the external power supply.
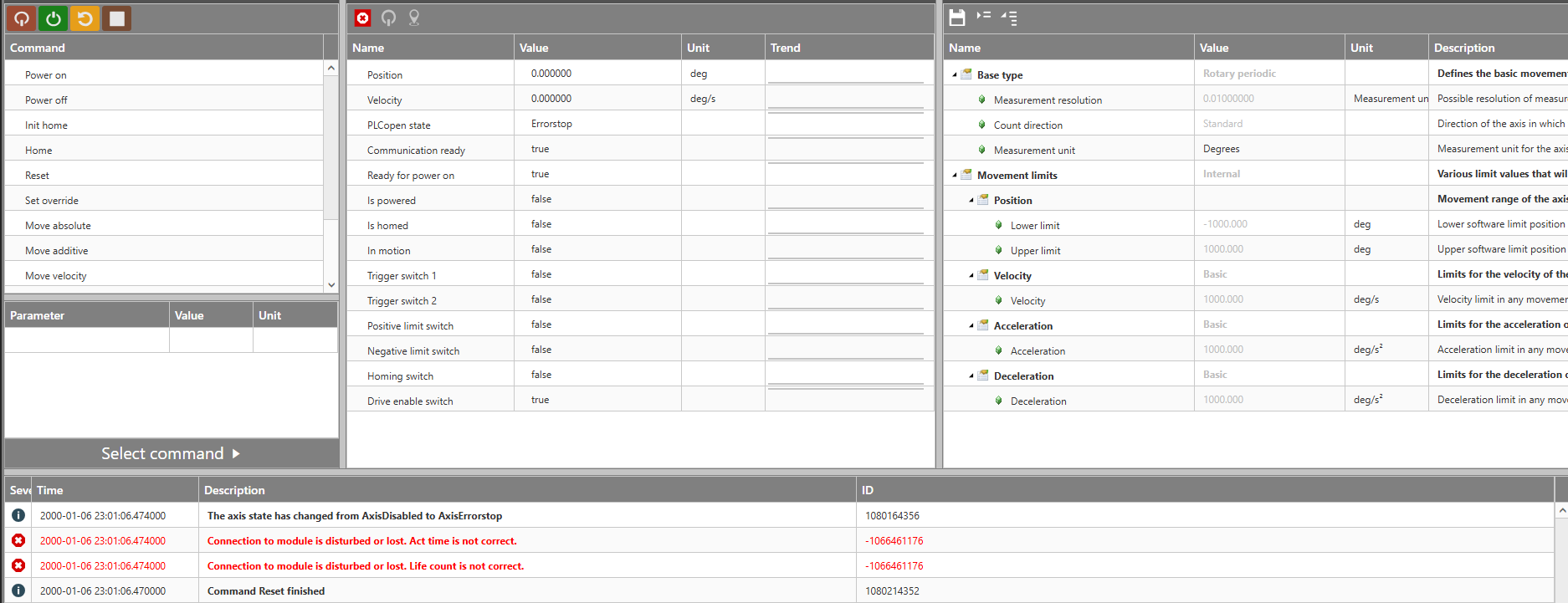
I continued with the configurations(Pictures attached). After I download my configurations. I tried to “Power on” the stepper, I am getting an error “-1066461176”
I tried open using mappCockpit. I still get the same error “-1066461176”
I am checked my wiring, I am pretty sure it is correct. Because the hybrid cable came with the 4-pin and 8-pin connector. I have wired according to the datasheet/manual and AS Help.
I could not troubleshoot any further, hoping to get some advise from the forum as well.