Hi all , we recently have a project which requires the use off ethercat veichi servo drives, the manuals indicate the drives work with ds402 standard protocols but when installing the xml files for ethercat i dont see any ds402 options but the standard PDO messages are available to io map ie.control and status word.
Is there any method on how to setup 3rd party Ethercat servo drives preferably with ds402 standard
the DS402 option on a B&R controller only works with the Powerlink field bus. You can use a purely virtual axis and program the DS402 operation yourself.
The AS6.3 software version has been released. Mapp Motion is also version 6.3. But it seems that the support for EtherCAT axis motion has not been seen yet? Is there any news or plan?
Hello,
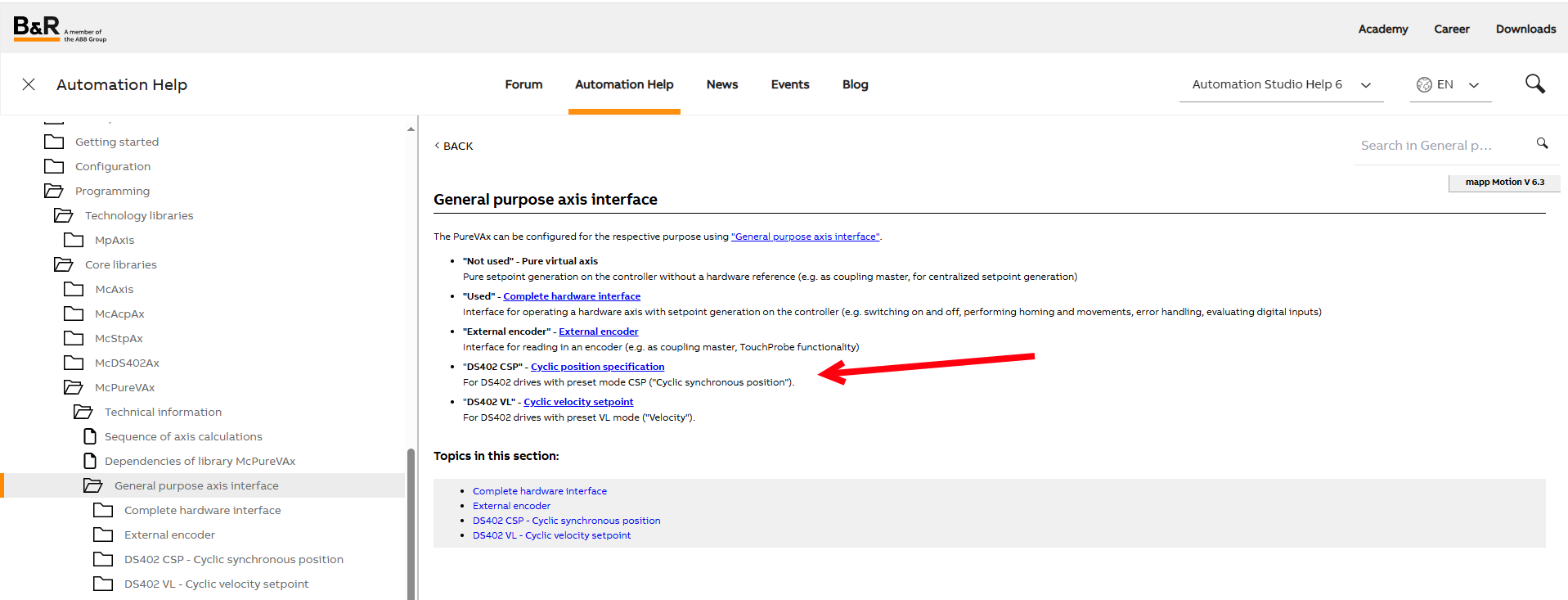
The Support was not implemented in to the DS402 Library. Instead the McPureVAx Library was extended in its functionality of the General Purpose Axis Interface. This interface can now be used to Support DS402 compatible 3ten Party Devices.
As far as i understood, you have to use a normal DeviceDescription File for your EtherCAT Drive. Then you have to create a Task with the nessesary Variables and they can then be coupled to the mapp Axis via the Configuration of the Gerneral Purpose Axis Interface.