ich arbeite aktuell mit Automation Studio 4.12, einer X20CP0483 CPU und mapp Motion.
Das Homing mit mcHOMING_ABSOLUTE funktioniert bereits.
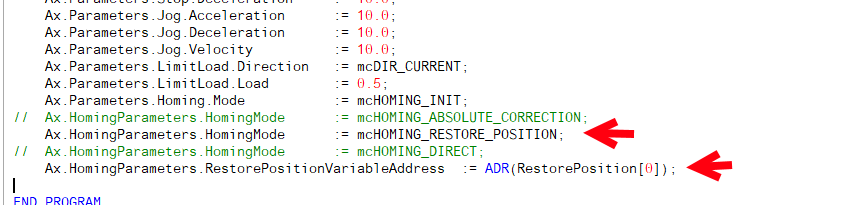
Nun möchte ich aber mcHOMING_RESTORE_POSITION nutzen, damit die Motorposition nach einem Neustart/Power Cycle erhalten bleibt.
Laut Doku soll dazu eine remanente Variable vom Typ McAcpAxRestorePosType angelegt werden, in der die Positionsdaten gespeichert werden. Diese Variable muss zwischen den Zyklen gespeichert und wieder eingelesen werden.
Meine Fragen:
Wie deklariere und initialisiere ich korrekt eine remanente Variable in ST, sodass die Achsposition dauerhaft erhalten bleibt?
Gibt es ein Minimalbeispiel in Structured Text, wie die remanente Variable angelegt wird und wie ich den Funktionsblock MC_BR_InitHome_AcpAx in Verbindung mit mcHOMING_RESTORE_POSITION verwende?
Rahmenbedingungen meiner Applikation:
Motor mit Single-Turn Encoder
Mechanik kann ca. 720° verfahren
Keine Endschalter vorhanden
Ich habe die Dokumentation bereits durchgesehen, hänge aber genau an dem Punkt, wie die remanente Variable erstellt und richtig verwendet wird.
Ein kleines Codebeispiel oder eine kurze Schritt-für-Schritt-Erklärung wäre super hilfreich.
wie oben beschrieben kannst den FUB “MC_BR_InitHome_AcpAx” mit den beschriebenen Einstellungen aufrufen und das Execute setzen. Damit wird dann der Referenzmodus eingestellt.
Danach setzt du dann beim MpAxisBasic den Home Eingang auf TRUE mit dem Mode “mcHOMING_INIT”. Es wird die letzte Position wieder hergestellt.
Da du nur ein Singleturn Geber hast funktioniert das wiederherstellen nur wenn der Geber keinen Überlauf hat. Du darfst also nur maximal eine Umdrehung verfahren ansonsten brauchst du einen Multiturn Geber.
Bei der Inbetriebnahme fährst du die Achse auf den gewünschten Nullpunkt und führst ein Homing “mcHOMING_DIRECT” durch.
Im nicht referenzierten Zustand, d.h. spannungslos oder bevor MC_Home aufgerufen wurde, darf sich die Achse nicht weiter als 1/2 Geberzählbereich bewegen,
damit die Position richtig wiederhergestellt werden kann.
Wenn die Achse referenziert ist darf sie sich beliebig weit bewegen, auch mit einem Singleturn-Geber.