I want to evaluate the tracking error. Is it possible to trace the reference (desired) trajectory values?
Hi Jan,
can you elaborate a little bit more what you want to achieve?
Thanks,
Roland
I have G-code that is creating a rectangle. G-code interpreter is somehow creating “desired path” and the robot is trying to achieve it. I would like to see, how well the robot can follow the instructions of the desired path and create TCP path. Mainly I would like to see if the G-code interpreter is just giving a static jump in the changes of XY positions or if it is linear, if there are ramps, what is the “desired” velocity, acceleration and deceleration and compare it to the actual TCP path made by robot, if he created some curves, some speed ramps etc.
Now, I am tracing the “Output” TCP path and path velocity and I would like to trace the “Input” as well and then using the mapp Cockpit mathfunctions to create difference between the two.
To trace (cyclically) the output of the reference trajectory values, I suggest that you familiarize yourself with the “Monitoring elements” axes-group feature.
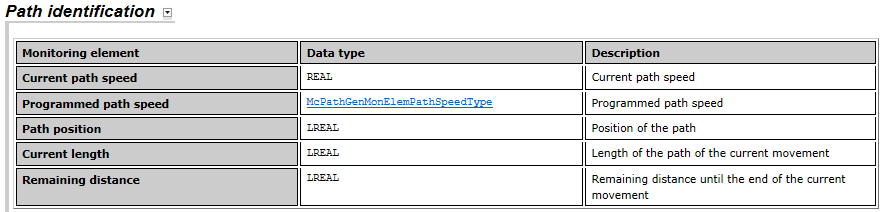
To get details on the path, you can use the “Path identification” element, see
Set positions can be monitored with

If you need derivatives of the data, you can compute it yourself or directly with mapp Cockpit.
The mapp Robotics trajectory planner will never create jumps. It will plan movements according to your input G-code program and make sure that limits are NOT exceeded. Therefore, it will not create “jumps” in positions or speeds.
Thank you! I will take a look.
Yes, that was what I was looking for! Thank you again!