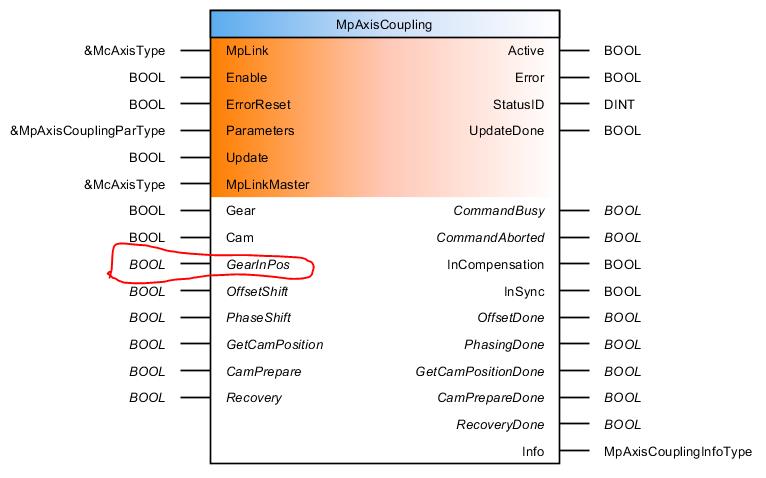
I’m trying to do something really simple. I have a master already running. I want the slave to synchronize so that slave position = master position. The slave will need to synchronize over multiple period of the master since it’s going really really fast.
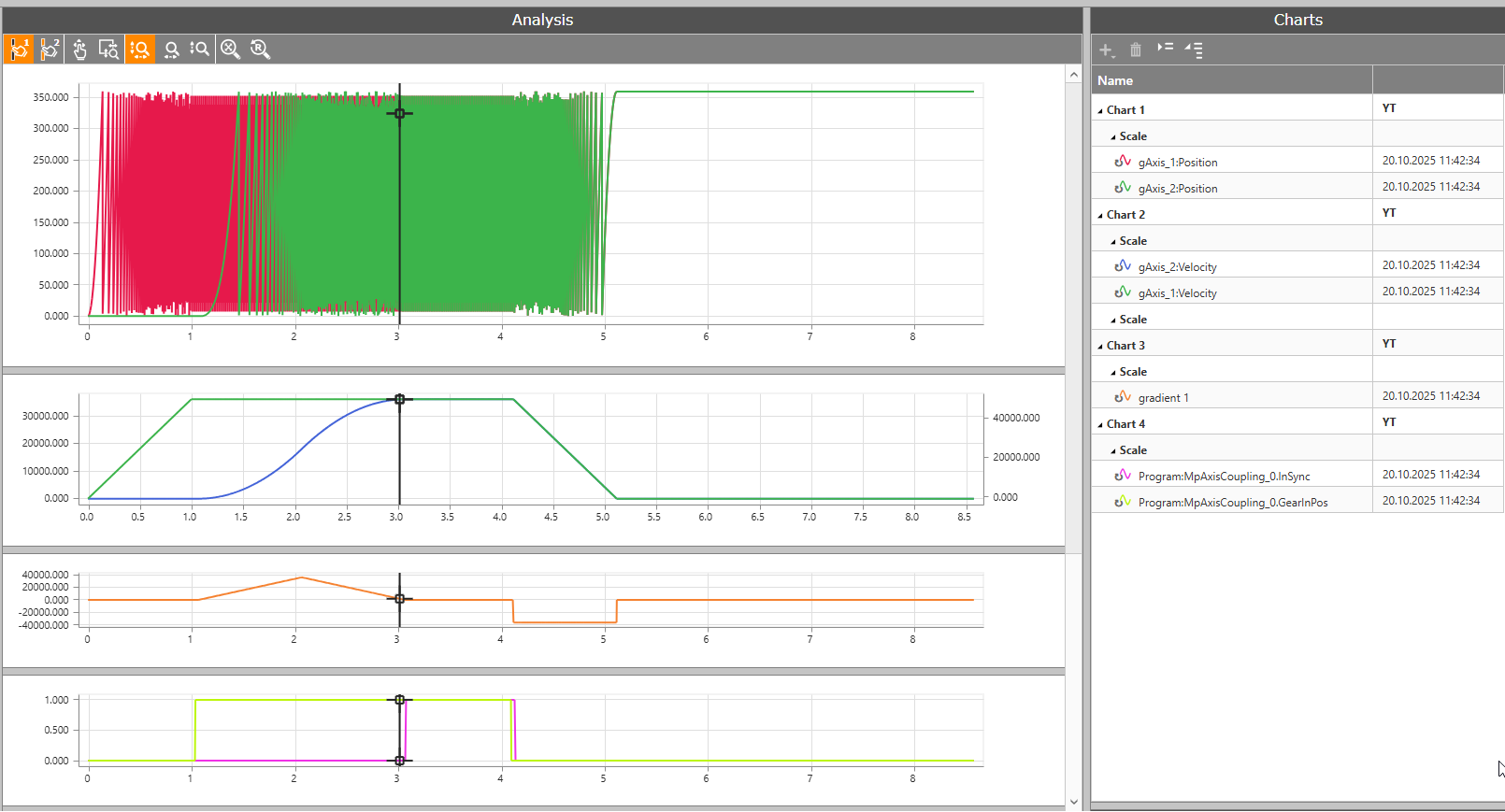
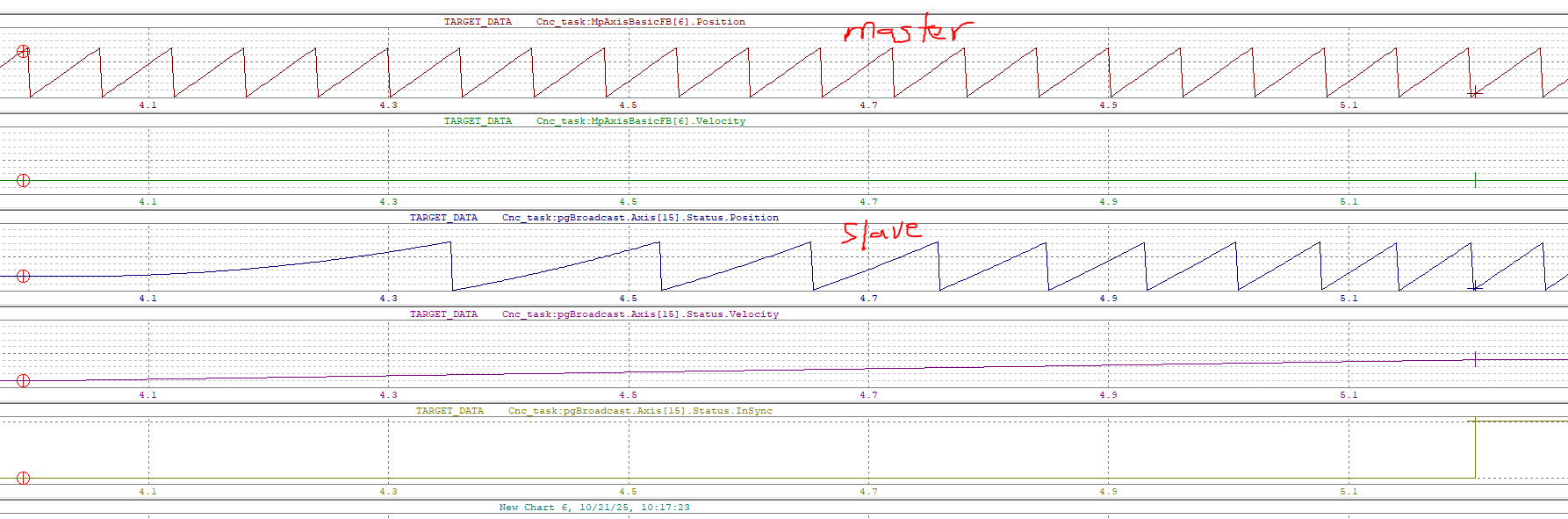
I can’t figure out the proper parameters to get this behavior. As seen in the chart below slave pos != master pos when synched and the slave exceeds both it’s velocity and accel limits. I’m not even sure how that’s possible without an error.
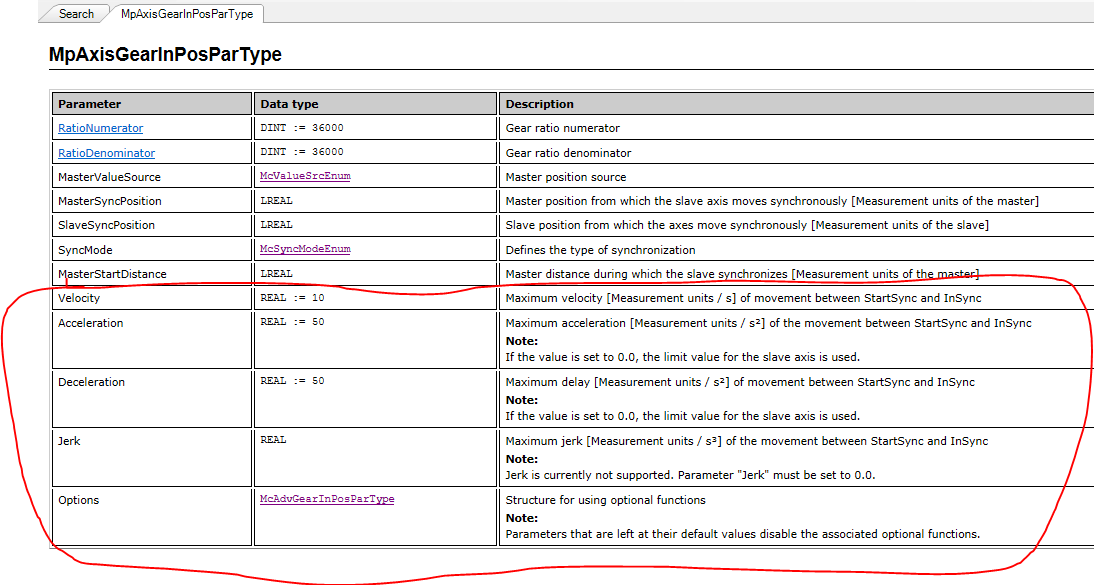
I think this is a bit tricky as i did also needed some time to understand how to set up the Parameters. Here is the Link to the AS-Help. GarInPos - Timing
The Parameters i have used. The SlaveSynchPosition gives the distance the Slave can move while in Compensation and it gives the Slave Period Position.
I was able to obtain the proper behavior with the help of Michael.
Here is a little bit more context with this GearInPos feature.
The axis limits are not taken into consideration and do not trigger an alarm. The only feedback you will have is an entry in the logger.
In simulation this is fine, but on the real machine you would most likely get a lag error.
These parameters are pretty much useless. Since you’re defining a CAM profile, you don’t really control the motion polynomial generated on the backend.
The most important thing to understand is the SlaveSyncPosition and the MasterStartDistance. I will just rephrase what Michael said. SlaveSyncPosition = Desired synchronized position + compensation distance and MasterStartDistance = Compensation distance. The MasterStartDistance should always be greater than your SlaveSyncPosition if you master is already moving.
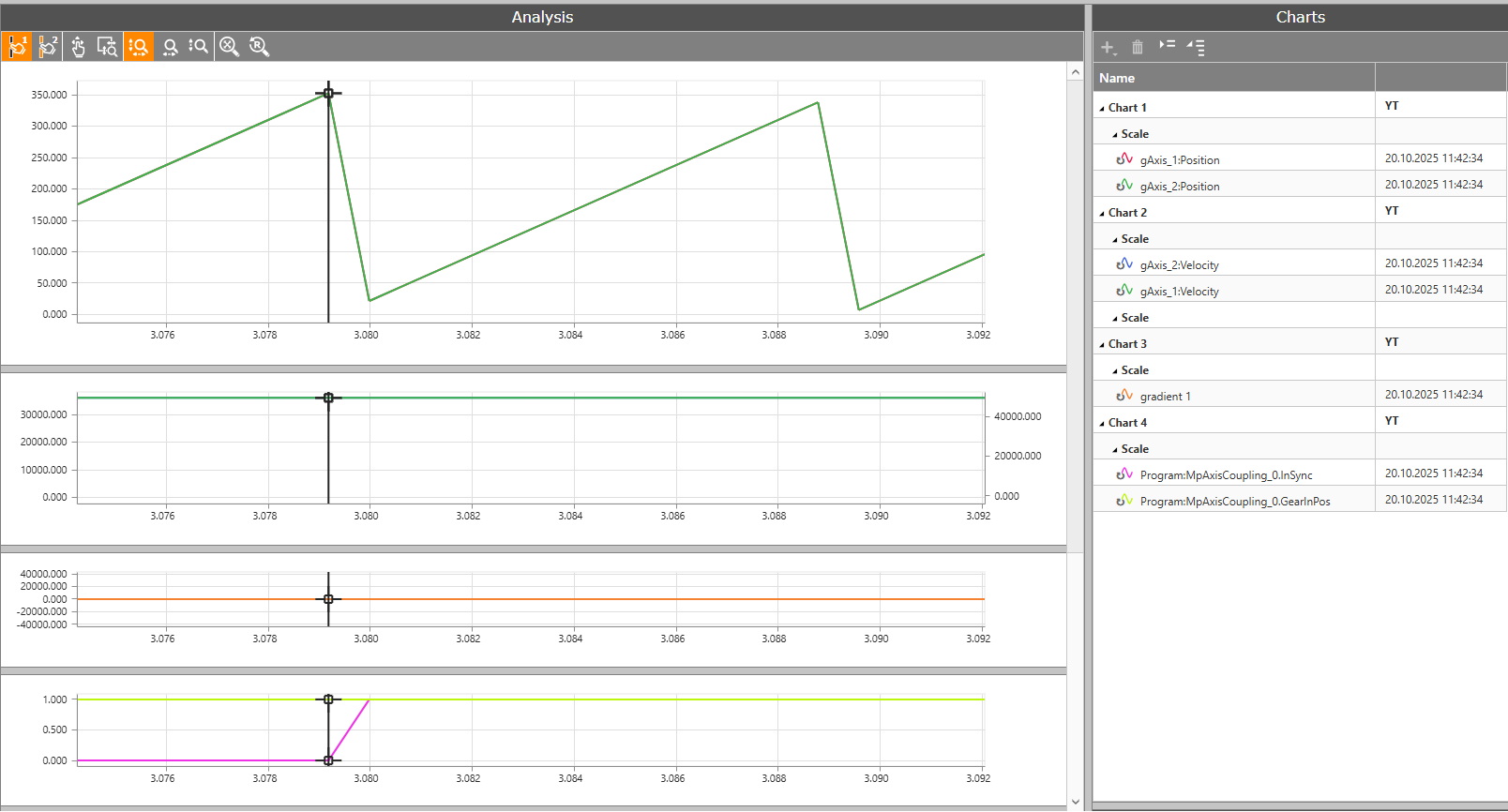
My master and slave axis have a period of 360. I want my slave to be synchronize to the master at position 0. I have SlaveSyncPosition = 3600 → 10 periods. I have MasterStartDistance = 7200 → 20 periods.
If you count the number of period since the command is issued, you’ll count 20 for master and 10 for the slave. It’s normal that the slave has less since it was at standstill to begin with.
Other point to note: RatioNumerator and RatioDenominator must be greater than some value to avoid the Too many cams per cycle error.
Hi,
in addition to what has been already said:
Is it possible to limit the dynamic to the axis limit by enabling SPF see Software end positions and movement limitations.
Of course the price to pay is that the axis could not follow perfectly the calculated profile