Hello,
I have several years of experience with B&R motion hardware, but I still use some workarounds to overcome (for me) unsolvable problems. I’d now like to take the opportunity to ask the community whether there are direct solutions. Here are two such problems:
Tuning vertical axes: According to several training materials, tuning should be possible. However, whatever I configure in the Test environment of ACP10 (ACP10AXIS_typ/setup/controller/parameter) leads to the brake releasing and the axis falling. My question is simple:
Is it possible to tune vertical axis controller loops without the axis falling?
(We typically use B&R’s P3 drives and PMSM motors.)
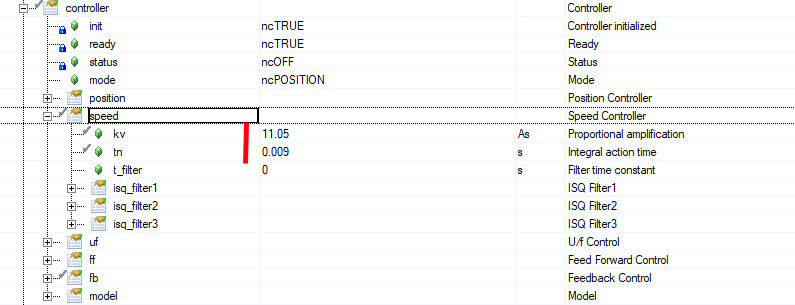
Integral part of the speed controller: Regardless of my tuning configuration, the integral part of the speed controller always remains zero. For horizontal axes, this might be acceptable, but for vertical axes, it consistently leads to a steady-state error. Is there a way to ensure the speed controller gets a non-zero integration action time during autotuning?
Thank you
Regards
Michal Malek
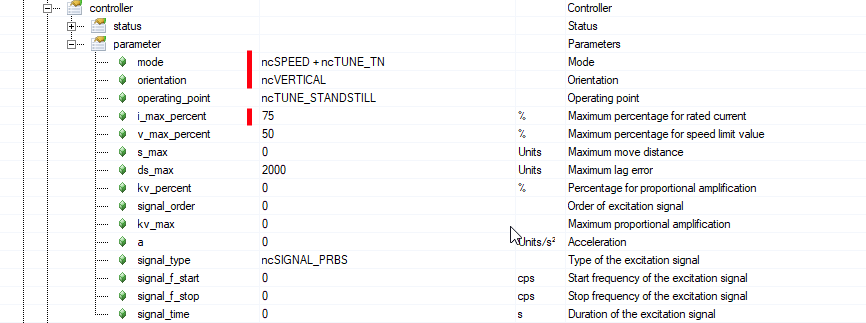
Then i opened the “Test” Window to set up the Tuning for the Speed Controller.
To get an Integral Action part you have to enable the Option-Bit “ncTUNE_TN”.
As it was told it is an vertical axis, i used “ncVERTICAL”.
It is important that the Current Limitation must be increased to an amount where the axis is able to hold the load. Use “i_max_percent” with a value high enought.
I did not adjust the defaul load model (just to save time), so i think there is no external force set up in this quick simulation test. But i think this would be the way to go.
If you have a real life hardware to test, i would be happy to have feedback.